Four-legged animals are one step ahead, especially in off-road conditions. In the last few years, robot manufacturers have been trying to use these movements effectively in quadruped robots. In a recent move about robots, Tencent Robotics X came from the company.
What is Tencent Robotics X’s new robot modeling based on?
Promising developments are being made to enable agile movement in quadruped robots. However, these models are often tested in simulated environments. When applied on real robots in real-world environments, their performance can sometimes suffer.
Agile has taken a new step towards realizing quadrupedal locomotion. The company started working on a new model using moving animal images collected by motion sensors and cameras. This approach, called imitation learning, makes it possible to reproduce animal-like movements in some quadruped robots.

Researchers Develop Tandem Solar Cell with Impressive 20% Efficiency, Paving the Way for Energy Sector Transformation
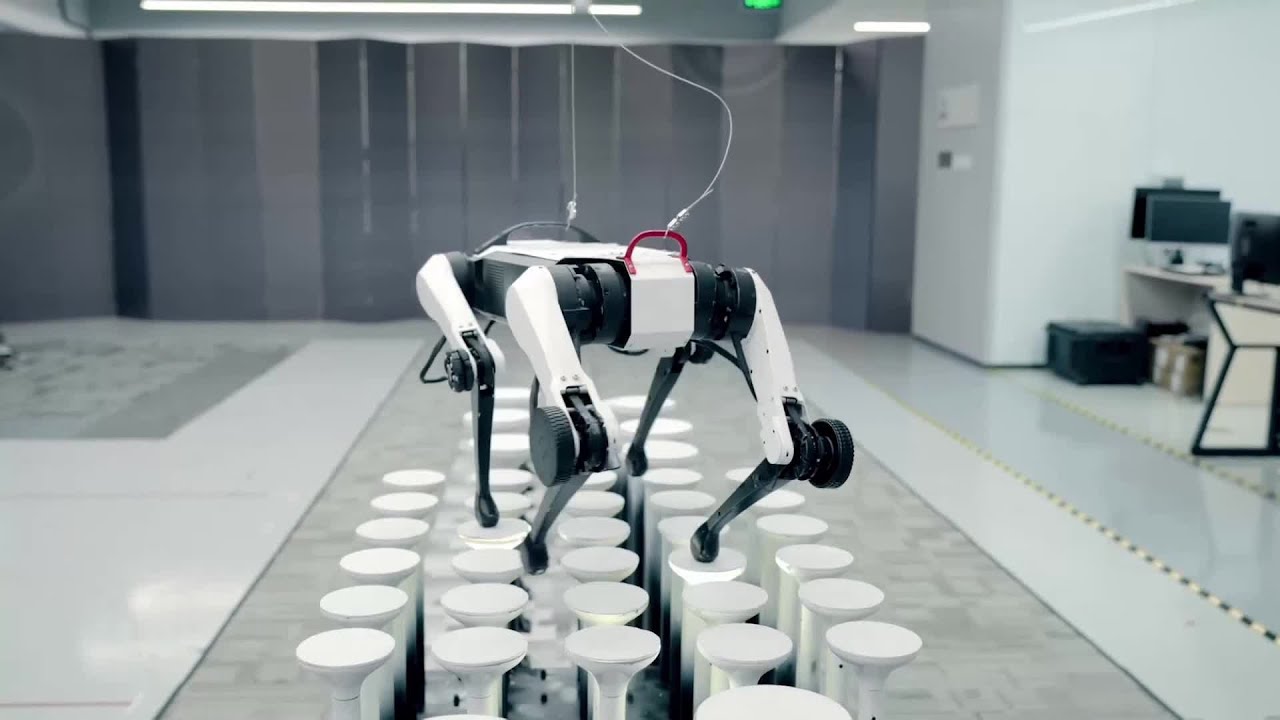
Researchers at Tencent Robotics X in China have introduced a new modeling framework that could facilitate the realization of animal-like agile movements in quadruped robots. The framework, described in a paper published in Nature Machine Intelligence, was initially applied to a quadruped robot called MAX, with very promising results.
The new modeling presented by the researchers involves a three-stage learning process, each focused on a different movement task and information extraction at the level of robot perception. The information obtained using animal movement data will be transferred to robots. Thus, robots will be enabled to move like real animals. Tencent Robotics X first applied these tests to a four-legged robot called “MAX”.
After the data transfer, “MAXX” was able to imitate animals, overcome complex obstacles and succeed in chase games. The company said that while the model was successful in initial tests, they do not yet know how it will behave in different environments. In the future, the model can be adapted to other quadruped robots. This could make it easier for them to be used in real-world environments.